I have owned a couple of bottlenecks for years, but could never get into practicing slide guitar, until recently, thanks to Allen Hinds. I guess ….

Guillaume Jeulin's Musical Home
I have owned a couple of bottlenecks for years, but could never get into practicing slide guitar, until recently, thanks to Allen Hinds. I guess ….

Ce soir, nous avons eu l’opportunité de participer à un concert unique en son genre avec le duo “Des Pieds et des Mains”. Cet événement ….
Height Issue My first Stratocaster is one of my favorite instruments (even though it is not a real Fender Strat), but I have always had ….

Palm Bender? I have always liked the sound of pedal steel (discovered the first time with Dire Straits I guess?), but there is no way ….

Last week I have finally took the time to use my network streaming tool “Connector” to to jam online (twice!) with my good friend Stéphane ….
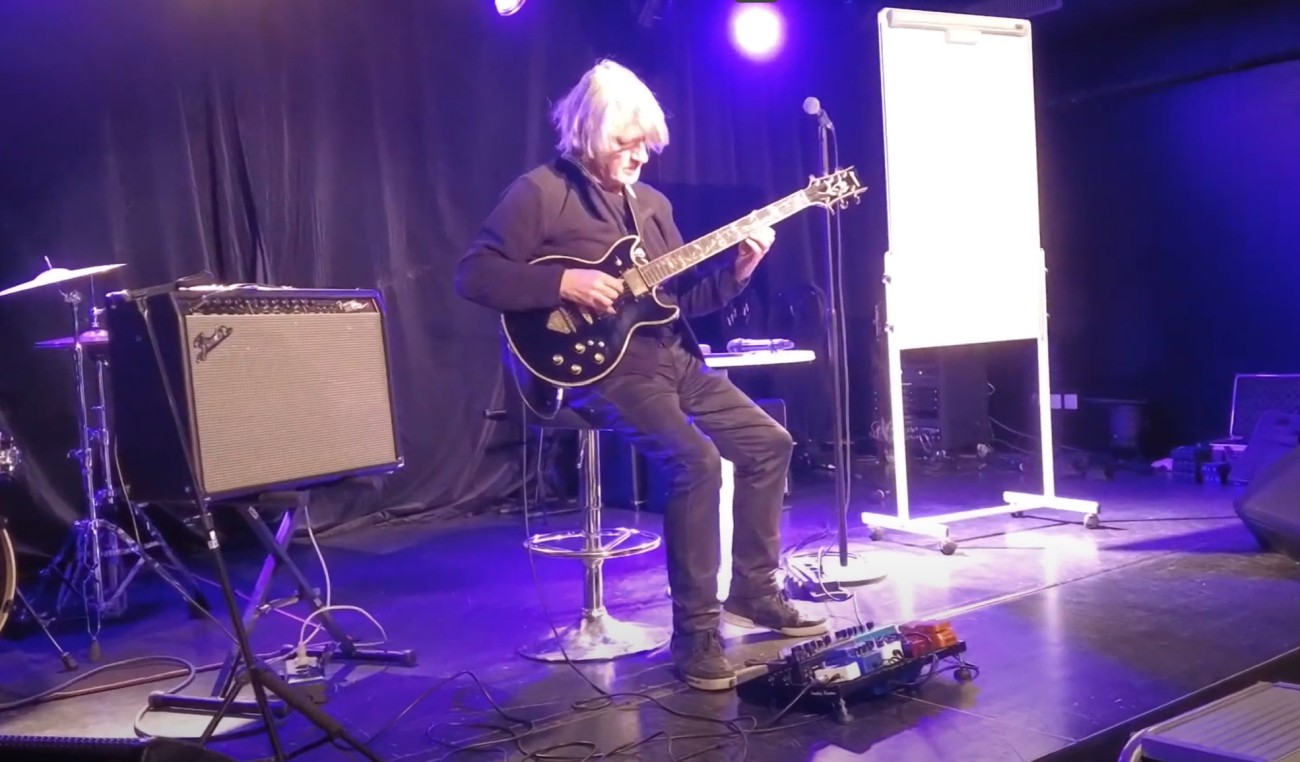
Le 10 Décembre 2022 se tenait une master class de Yannick Robert sur l’improvisation, organisée par le Labo à Dinan. Impossible de rater cela! Yannick Robert ….

Après le silence, voici la suite de la série des commandements de l’improvisateur: structurer son discours! En effet, la musique est un langage à part ….

Back in the 20th century, I used to plug my guitar into a preamp/multi effect processor, amplified by a Peavey Classic 50/50 tube power amp ….
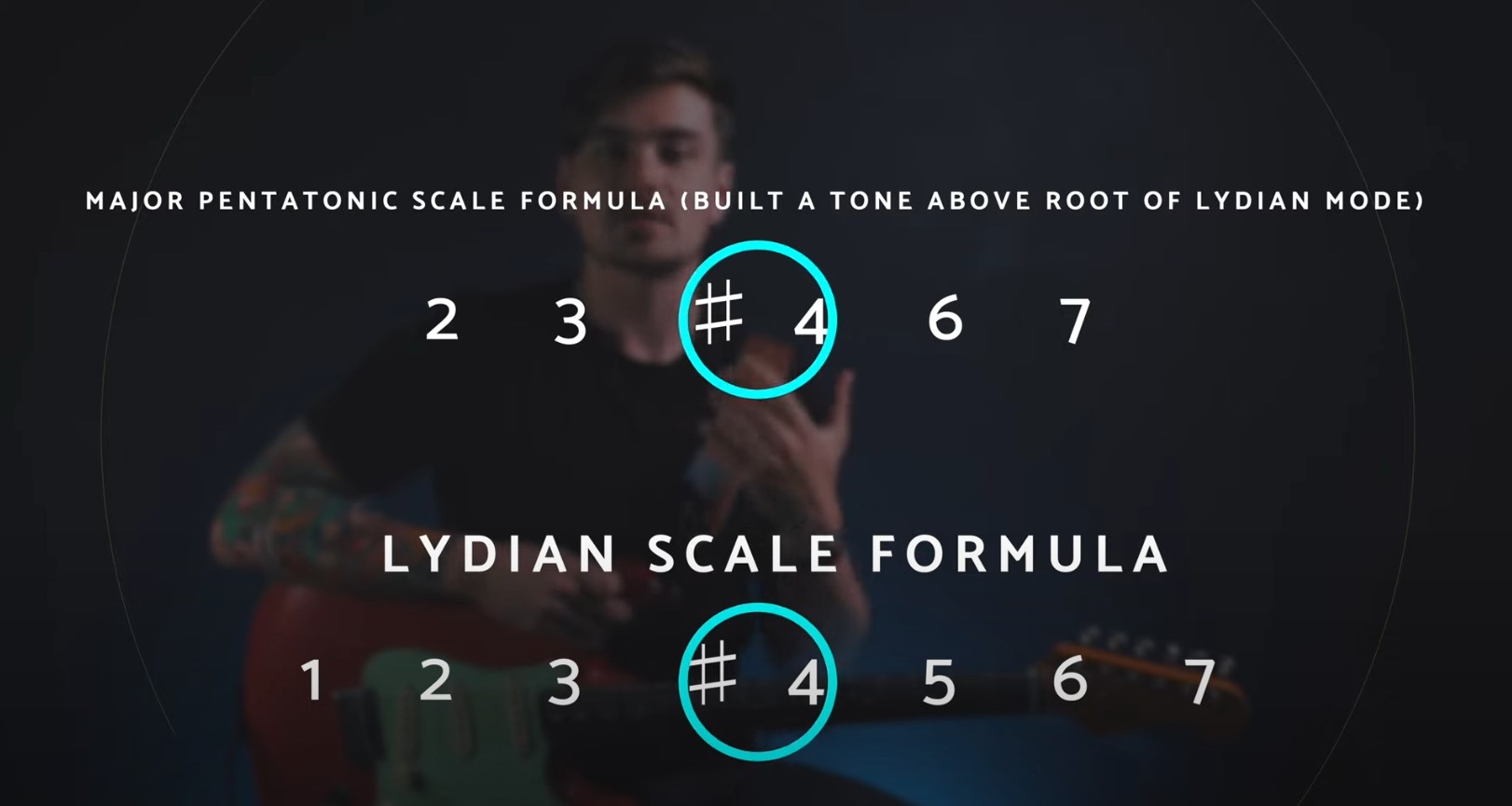
Today I stumbled upon Ross Campbell‘s video (see below), where he explains how you can use 3 different pentatonic scales on the Lydian mode. If ….